
自动泊车(APA)系统介绍
发布时间:2025-06-03 14:38分类: 无 浏览:116评论:0
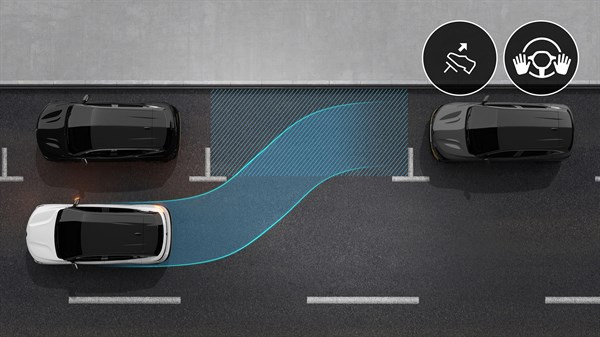
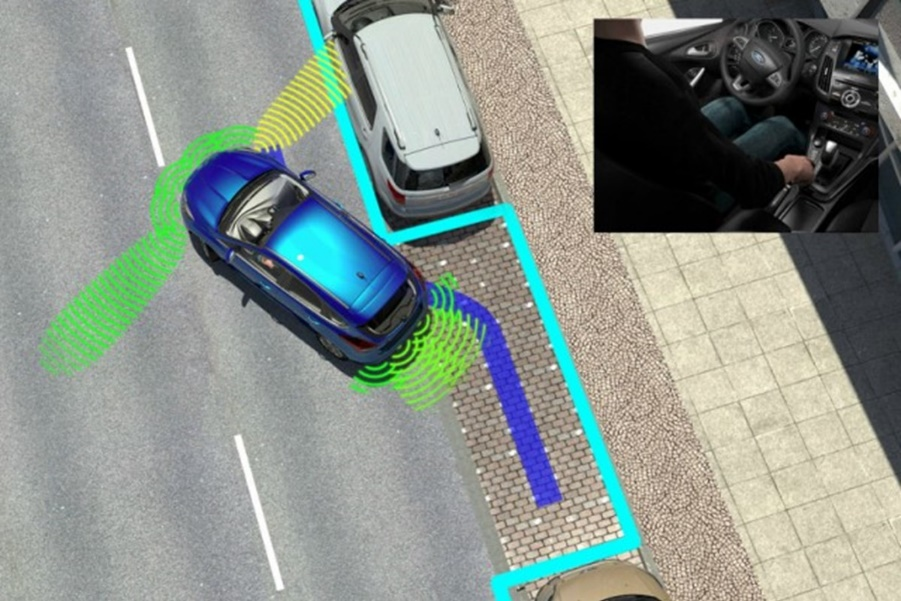
自动泊车系统(APA, Automated Parking Assist)是一套集感知、决策、路径规划与车辆控制于一体的智能驾驶辅助系统,能够在驾驶员无需直接控制方向盘、油门和刹车的情况下,实现车辆从静止状态开始至完成泊车或驶离车位的全过程自动化操作。该系统主要依赖对车辆环境的感知、泊车位的识别与判断、动态路径规划,以及对整车底层控制系统的全面调度与协调,最终实现精准、安全、平稳的自动泊车体验。
1.1 系统核心控制目标
APA系统通过综合控制转向系统、制动系统、动力系统(电机或内燃机/变速器)来执行自动泊车任务,具体包括:
转向系统控制:系统可控制EPS(电动助力转向系统)实现精准的方向调整;
制动系统控制:通过对EPB(电子驻车系统)、ESC(电子稳定控制系统)等的控制,实现柔性制动和紧急刹车;
动力系统控制:对驱动扭矩的精确调节(尤其在电动车中对电机扭矩的细化控制),实现泊车过程中的低速精确移动。
1.2 系统主要子功能模块
APA系统通常包括以下几个关键子功能模块,各模块协调运行,实现泊车任务的全过程:
模块名称 | 子功能 | 关键能力/技术路径 | 说明 |
1. 车库位检测模块 | 车位类型识别 | - 识别线库位(有标线) | 使用视觉和雷达结合,区分不同类型停车位 |
- 识别空间库位(无标线,空间容积判断) | |||
| 车位测量与评估 | - 多传感器融合(超声波、摄像头、毫米波雷达) | 精确评估车位是否满足泊车需求 |
- 测量车位长度、宽度、高度 | |||
-评估障碍物间距、泊车可行性 | |||
| 动态更新能力 | - 行驶中实时检测 | 避免静态误判,提高识别灵活性 |
- 实时更新车位占用状态与环境变化 | |||
2. 车辆泊入控制模块 | 泊车轨迹规划 | - 结合当前位姿与目标车位 | 规划平滑、安全的泊车路径 |
- 考虑车长、转弯半径、周边障碍物 | |||
- 生成可行路径 | |||
| 路径跟踪控制 | - 精准控制转向角、车速、加速度 | 实现精准入位 |
- 保持对路径的稳定追踪 | |||
| 多阶段倒车控制 | - 支持一把倒、二次调整入位等多阶段方案 | 提高成功泊入的适应性与灵活性 |
- 应对狭窄或复杂环境 | |||
| 碰撞避让机制 | - 实时障碍物监测 | 确保泊车过程中的安全 |
- 动态路径调整 | |||
- 紧急制动机制 | |||
3. 车辆泊出控制模块 | 车位边界识别 | - 利用静态地图或实时感知,识别泊出环境 | 准确识别出库边界 |
| 路径规划与避障 | - 生成泊出路径(正出/倒出) | 提高出库安全与效率 |
- 避让邻车、行人、障碍物 | |||
| 泊出动作控制 | - 控制低速行驶、方向修正、刹车行为 | 顺利驶离车位,避免剐蹭 |
4. HMI人机交互模块 | 启停控制 | -驾驶员通过中控屏、物理按键、语音或APP发出命令 | 多方式启动与停止,便于使用 |
| 泊车状态提示 | - 图像显示泊车过程 | 提供直观清晰的过程反馈 |
- 语音播报剩余距离、警告等 | |||
- 指示灯反馈 | |||
| 异常干预能力 | - 驾驶员可随时中断 | 避免因异常造成事故,增强系统可控性 |
- 系统快速释放控制权 |
2.1 State Machine / Operating Sequence 状态机/工作序列
State machine diagram状态迁移图
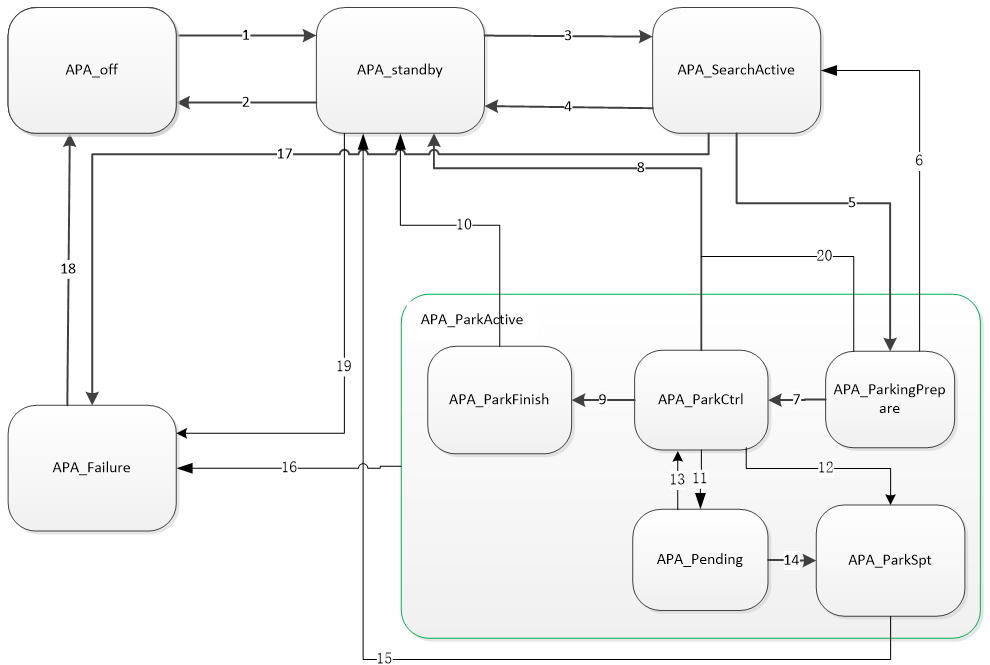
图中的状态图清晰地展示了自动泊车系统(APA:Automatic Parking Assist)的各个状态节点及其状态转换逻辑。它是一个有限状态机(FSM)的建模,描述了APA系统从关闭到激活、执行泊车任务、完成或失败的整个状态转移流程。
状态 | 描述 |
APA_OFF | 下电 |
APA_Standby | 上电状态 |
APA_SearchActive | 寻找车位 |
APA_ Failure | 故障失效 |
APA_ParkPrepare | 泊车准备,驾驶员握手前换挡操作以及路径规划成功后 |
APA_ParkCtrl | 泊车控制过程 |
APA_ParkFinish | 泊车结束 |
APA_ParkSpt | 泊车中断不可逆 |
APA_ParkPending | 泊车中断可逆 |
2.1.1 State and events状态与事件
State状态
主状态有5种:
APA _ Sleep
APA_ Standby
APA _ SearchActive
APA_ ParkActive
APA_ Failure
状态 | 描述 |
APA_off | 系统关闭状态,APA功能未激活,等待用户启用。 |
APA_standby | 待命状态,系统已激活但未执行具体任务,等待泊车指令。 |
APA_SearchActive | 车位搜索激活状态,系统正在搜索可泊车的目标车位。 |
APA_ParkActive | 泊车执行状态,是复合状态(包含多个子状态),表示APA系统正在执行泊车流程。 |
APA_Failure | 系统故障状态,可能因传感器异常、控制失败、用户中断等原因导致APA功能终止。 |
APA_ ParkActive子状态有5种:
APA_ParkPrepare
APA_ParkCtrl
APA_ParkFinish
APA_ParkSpt
APA_ParkPending
子状态 | 描述 |
APA_ParkingPrepare | 泊车准备阶段,系统评估泊车点位与路径、车辆姿态调整等准备动作。 |
APA_ParkSpt | 支持泊车(辅助阶段),进行泊车过程的路径计算及控制准备。 |
APA_ParkCtrl | 泊车控制阶段,执行具体泊车动作(控制转向、加减速)。 |
APA_Pending | 暂停状态,泊车过程被暂时中断或等待用户确认,可能因突发情况。 |
APA_ParkFinish | 泊车完成状态,系统完成泊入并退出控制。 |
将这张 APA(自动泊车辅助)状态机图系统性地转化为状态描述表(State Transition Table),以表格形式更清晰地描述各个状态的事件触发、条件判断、状态转移结果。
主状态转移表(一级状态)
当前状态 | 触发事件/ 条件 | 下一个状态 | 说明 |
APA_off | 用户启用APA系统 | APA_standby | 状态1 |
APA_off | 系统检测到故障 | APA_Failure | 状态18 |
APA_standby | 用户关闭APA系统 | APA_off | 状态2 |
APA_standby | 用户启动泊车流程 | APA_SearchActive | 状态3 |
APA_standby | 直接指定车位进行泊车 | APA_ParkActive.APA_ParkingPrepare | 状态10 |
APA_standby | 检测到系统故障 | APA_Failure | 状态17 |
APA_SearchActive | 用户取消搜索 | APA_standby | 状态4 |
APA_SearchActive | 找到泊车位 | APA_ParkActive.APA_ParkingPrepare | 状态8/20 |
APA_SearchActive | 系统故障 | APA_Failure | 状态6 |
APA_ParkActive | 泊车流程中异常 | APA_Failure | 状态15 |
APA_ParkActive | 泊车完成 | APA_ParkFinish → APA_standby | 状态9 → 19 |
APA_Failure | 用户手动复位系统或系统自动恢复 | APA_standby | 状态7 |
APA_Failure | 用户关闭系统 | APA_off | 状态16 |
子状态转移表(APA_ParkActive 内部状态)
当前状态 | 触发事件/ 条件 | 下一个状态 | 说明 |
APA_ParkingPrepare | 准备完成 | APA_ParkSpt | 状态12 |
APA_ParkSpt | 支持阶段完成 | APA_ParkCtrl | 状态14 |
APA_ParkCtrl | 泊车完成 | APA_ParkFinish | 状态9 |
APA_ParkCtrl | 泊车过程中被暂停 | APA_Pending | 状态11 |
APA_Pending | 恢复泊车 | APA_ParkCtrl | 状态13 |
APA_ParkFinish | 停车完成流程退出 | APA_standby | 状态19 |
所有状态到 APA_Failure 的跳转(错误统一处理)图中明显体现了每一个主状态均可根据条件跳转至 APA_Failure。
当前状态 | 条件 | 下一个状态 | 说明 |
APA_off | 硬件/软件初始化异常 | APA_Failure | 状态18 |
APA_standby | 检测到系统异常 | APA_Failure | 状态17 |
APA_SearchActive | 传感器/规划异常 | APA_Failure | 状态6 |
APA_ParkActive 内任一子状态 | 控制/路径规划失败 | APA_Failure | 状态15 |
APA状态到输出信号的映射机制
Output Signal Value 输出信号值 | Main State 主状态 | Sub State Left 子状态 | Comments 说明 |
APA off | APA _ OFF | 通知HMI | |
APA_Standby | APA_ Standby | 持续发出至HMI | |
APA_SearchActive | APA_SearchActive | 持续发出至HMI | |
APA_ParkActive | APA_ParkActive | 持续发出至HMI | |
APA_ Failure | APA_ Failure | 通知HMI | |
APA_ParkPrepare | APA_ ParkActive | 持续发出至HMI | |
APA_ParkCtrl | APA_ ParkActive | 持续发出至HMI | |
APA_ParkFinish | APA_ ParkActive | 持续发出至HMI | |
APA_ParkSpt | APA_ ParkActive | 持续发出至HMI | |
APA_ParkPending | APA_ ParkActive | 持续发出至HMI |
Events事件,按状态迁移图所示,事件可以触发状态的改变,相关的事件描述见下。
序号 | 状态转换 | 条件类型 | 触发条件描述 | 备注 |
1 | APA_off→ APA_Standby | 所有条件需满足 | - 硬件初始化已完成 | - |
- 系统上电 | ||||
- 功能已配置 | ||||
2 | APA_Standby/Failure → APA_off | 所有条件需满足 | - 系统下电 | - |
3 | All→ APA_Failure | 任一条件满足 | - 永久性系统硬件故障 | - |
- 临时性系统硬件故障 | ||||
- 通信故障(如报文超时、计数器/冗余检查/数据长度故障) | ||||
- 信号故障(如车速信号无效) | ||||
4 | APA_Standby → APA_SearchActive | 所有条件需满足 | - APA按钮开关使能 | - |
- EPT_Ready为使能 | ||||
- 车速< 25 kph | ||||
- 挡位为D档 | ||||
- 四门两盖及安全带状态稳定 | ||||
5 | APA_SearchActive → APA_Standby | 任一条件满足 | 泊入阶段: | - |
- 车速> 30kph | ||||
- 搜索车位时非D挡停留>30s | ||||
- 驾驶员取消激活 | ||||
泊出阶段: | ||||
- 车辆非静止状态 | ||||
6 | APA_SearchActive → APA_ParkPrepare | 所有条件需满足 | - 已收到车位搜寻成功标志 | 关闭车位扫描算法,检测安全条件,控制器握手 |
- 已收到路径规划完成标志 | ||||
- 挡位为倒挡 | ||||
- 车速< 0.5kph且车辆停止 | ||||
7 | APA_ParkPrepare → APA_SearchActive | 所有条件需满足 | - 驾驶员未干预挡位/刹车 | - |
8 | APA_ParkPrepare → APA_ParkCtrl | 所有条件需满足 | - EPS握手成功 | - |
- 驾驶员未踩刹车踏板 | ||||
9 | APA_ParkCtrl → APA_Standby | - | - 车辆超过一定时间 | - |
10 | APA_ParkCtrl → APA_ParkFinish | 所有条件需满足 | - 收到泊车控制完成标志 | - |
11 | APA_ParkFinish → APA_Standby | 任一条件满足 | - 车速< 0.5kph且停止/EPB拉起/挡位为P | - |
- 超时5000ms | ||||
12 | APA_ParkCtrl → APA_ParkPending | 任一条件满足 | - 驾驶员干预(方向盘、危险区域障碍) | - |
- 车门开启 | ||||
- 安全带松开 | ||||
13 | APA_ParkCtrl → APA_ParkSpt | 任一条件满足 | - 驾驶员干预(方向盘、危险区域障碍) | - |
14 | APA_ParkPending → APA_ParkCtrl | 任一条件满足 | - 危险区域障碍在30s内移除 | - |
- 车门在30s内关闭 | ||||
- 安全带在30s内系紧 | ||||
15 | APA_ParkPending → APA_PrkStp | 任一条件满足 | - 危险障碍>5000ms 或超2次 | - |
- 车门开启>5000ms | ||||
- 安全带松开>5000ms | ||||
16 | APA_PrkStp → APA_Standby | 任一条件满足 | - 车辆停止+EPB拉起 | - |
- 车辆停止+驾驶员踩刹车 | ||||
- 状态停留>5000ms | ||||
17 | APA_ParkPrepare → APA_Standby | 任一条件满足 | 泊入功能: | - |
- 后视镜折叠30s未复位 | ||||
- 提示门盖30s未关闭 | ||||
- 30s未挂P挡 | ||||
- APA遥控设备30s失效 | ||||
- 车辆非静止 | ||||
泊出功能: | ||||
- 条件同上 |
2.2 Typical Use Cases典型用例
APA系统支持多种实际泊车场景与车位类型,支持线库位和空间库位的检测和车辆泊入,支持水平、垂直及斜向车位的泊入,支持水平库位及垂直库位的泊出涵盖广泛、适应性强:
类型 | 描述 | 感知与控制挑战 |
线库位泊入 | 识别有明确白线或黄线标识的标准车位 | 依赖视觉识别与精准边缘检测算法 |
空间库位泊入 | 无明确标线,仅通过识别空间轮廓 | 需融合多种传感器,准确判断空间边界 |
水平车位泊入 | 侧方停车(路边停车) | 空间狭窄,对轨迹控制精度要求高 |
垂直车位泊入 | 倒车直线进入车位,常见于地库 | 较为常规,但对泊入深度控制有要求 |
斜向车位泊入 | 倒斜角进入车位,如30°/45°/60°角度 | 轨迹规划复杂,需适应不规则车位线 |
水平车位泊出 | 倒车驶出侧方车位,避让侧后方障碍物 | 需要大范围感知与动态路径避障 |
垂直车位泊出 | 向前驶出或倒车驶出垂直车位 | 相对简单,但需识别相邻障碍车辆 |
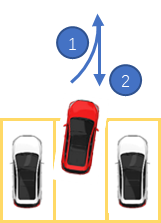
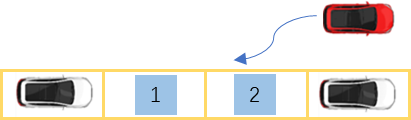
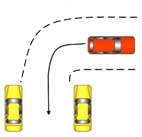
使用案例图例 | 使用案例描述 |
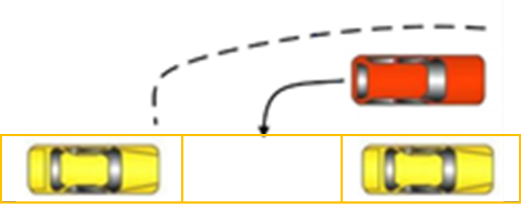
| 空间水平库位泊入:
|
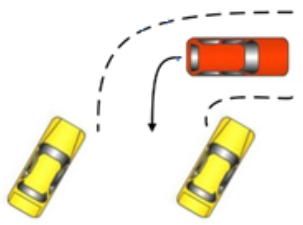
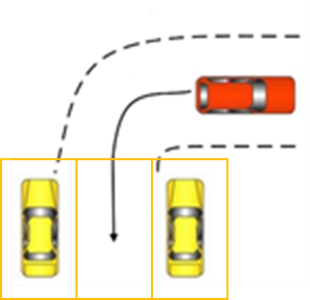
| 空间垂直库位泊入:
|
| 双边界斜车位泊车泊入:
|
| 线水平库位泊入:
|
| 线垂直库位泊入:
|
 | 泊车路径规划:
|
 | 泊车车位识别:
|
 | 水平车辆泊出:
|
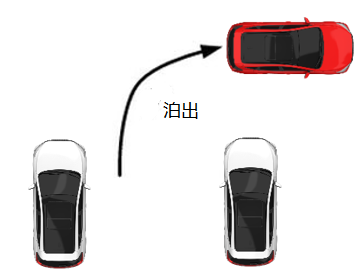 | 垂直车辆泊出:
|

2.3 APA系统性能影响因素详解:天气、照明与车道线状况
APA功能受限于故障及在章节“状态机/工作序列” 中列举的各种抑制事件。
APA性能受天气、照明度和车道线清晰度的影响,在下雨、背光,日落,路面被冰雪覆盖以及路面磨损严重的情况下,性能会有显著的下降。
自动泊车辅助系统(APA, Automated Parking Assist)依赖多种传感器(如超声波雷达、摄像头、毫米波雷达等)获取环境信息并进行感知、定位与路径规划。然而,其整体性能在实际运行中,受到外部环境因素的显著影响。以下详细分析天气、照明及车道线清晰度等因素对APA性能的具体影响:

天气因素影响
天气状况 | 影响机制 | 对APA性能的具体影响 | 风险等级 |
降雨(中到大雨) | 雨滴附着在摄像头镜头上、雷达信号干扰 | - 视觉感知模糊,车位识别率下降 | 中-高 |
- 障碍物识别滞后或误报 | |||
- 路面标线无法有效提取 | |||
大雾/浓雾 | 可见度降低,视觉与激光传感器均受影响 | - 车位识别失败 | 高 |
- 路径规划不稳定 | |||
- 室外泊车失败率显著上升 | |||
暴雪/雨夹雪 | 路面覆盖、摄像头被遮挡、传感器冻结 | - 车位和边界完全不可识别 | 极高 |
- 无法识别障碍物和车道线 | |||
- APA系统不可用或误动作 | |||
冰冻路面 | 车轮易打滑影响低速控制精度 | - 可能发生轨迹偏移或刹车不及时 | 中 |
- 驶入/驶出路径执行受限 | |||
风沙/尘暴天气 | 镜头污染、光学干扰增强 | - 视觉识别准确性下降 | 中 |
- 车位框识别错误率提高 | |||
积水路段 | 反光强烈,图像干扰 | - 车道线无法有效提取 | 中 |
- APA系统误判障碍 |
照明条件影响
照明场景 | 影响机制 | 对APA系统的影响 | 风险等级 |
日落/黄昏时段 | 背光强、对比度弱 | - 车位标记及线条难以识别 | 中 |
- 摄像头图像曝光不均衡 | |||
夜间光照不足 | 车外环境较暗,摄像头性能受限 | - 车位边界模糊 | 高 |
- 行人/障碍物检测不稳定 | |||
- APA识别率显著下降 | |||
逆光/强烈背光 | 图像过曝,线条模糊 | - 路面车位框丢失 | 高 |
- APA无法进入SearchActive状态 | |||
强烈反光(如阳光照射湿地面) | 镜头眩光干扰 | - APA路径规划误差 | 中 |
- 目标区域边缘识别失败 | |||
停车场阴影区域 | 明暗反差剧烈 | - 边界识别模糊不清 | 中 |
- 极端条件下导致APA误识别墙体或车位 |
车道线与地面标识状况
路面状况 | 问题描述 | 对APA性能的影响 | 风险等级 |
车道线模糊或缺失 | 老化、覆盖或标线断裂 | - APA无法判断可泊车区域 | 高 |
- 路径规划失败 | |||
- 泊车入口误判 | |||
路面覆盖物(落叶、积雪、泥沙等) | 遮挡车位边缘与地标 | - APA判断车位形状不完整 | 高 |
- 识别出错误类型车位或误报障碍物 | |||
车位线严重磨损 | 白线颜色对比度不足 | - APA无法激活泊车搜索流程 | 高 |
- 车位搜索效率显著下降 | |||
非标准停车位标识(如斜线、非矩形) | 与标准图像库匹配度低 | - 误判车位形状或方向 | 中 |
- APA拒绝执行泊车操作 | |||
杂乱车位编号、广告图案干扰 | 算法误提取图案为线条 | - APA误判图案为车位线 | 中 |
- 泊车路径出现误导 |
总结:
自动泊车系统(APA)作为智能驾驶辅助的重要组成部分,融合了环境感知、路径规划、底盘控制以及人机交互等多项关键技术,具备高度系统集成性与协同控制能力。通过完整的状态机逻辑与功能模块划分,APA系统不仅能够实现精准、安全的泊入与泊出操作,还能在复杂环境下灵活应对多种泊车情形,有效减轻驾驶负担、提升泊车效率与驾驶安全性。随着传感器性能的提升与算法的持续优化,APA系统正朝着更高精度、更强场景适应性与更友好交互体验方向不断演进,为未来高级自动驾驶打下坚实基础。
1.Who is at fault if park assist fails? - The Globe and Mail
2.What is park assist? - Car Keys
3.Parking assistance - Megane E-Tech 100% electric - Renault
4.APA (Automatic Parking Assist) - AutoSys (TW) Co., Ltd.

- 排行